topic
[Cobodeck] Unity Integration of Deformable Object Simulation for VR study
16.10.2025
Description:
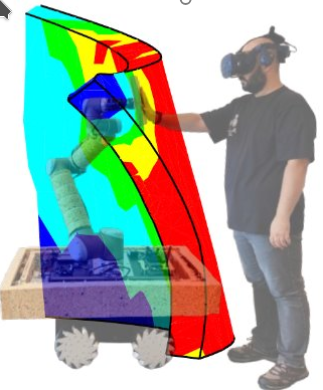
- Our encountered-type haptic platform with a robotic arm on a mobile base presents physical touchable props in VR. This allows users to touch virtual objects or push against a deformable wall and feel its flexibility.
- The haptic platform and the material deflection simulation with the robotic arm exists. However, a Unity VR environment to perform a user study with deformable objects is required.
Tasks:
- Create an immersive VR environment in Unity where users can explore a corridor or room with various objects (walls, doors, furniture).
- Integrate our robotic platform in the Unity application via ROS, to simulate the haptic feedback for the interactive objects.
- For larger projects: extend the Unity-ROS integration, implement haptic feedback logic, and support different material properties such as stiffness and compliance.
Setup/IDE: Unity 6, ROS
Prerequisites:
- Experience with Unity (VR development is a plus), Programming skills,
Basic knowledge of Linux cmd