Using Virtual Drift and Curvature Gains for Navigating in Virtual Reality
24.09.2024
Description
Any VR application must provide methods to support unlimited and unconstrained virtual environment navigation and, if possible, provide a navigation experience like in real life. However, how users navigate in VEs rarely matches how humans navigate in real environments (REs), mainly due to technical constraints such as additional hardware or the limited workspace. To overcome such limitations, many locomotion techniques (LTs) have been proposed, which can be classified according to the required motion involvement of the user.
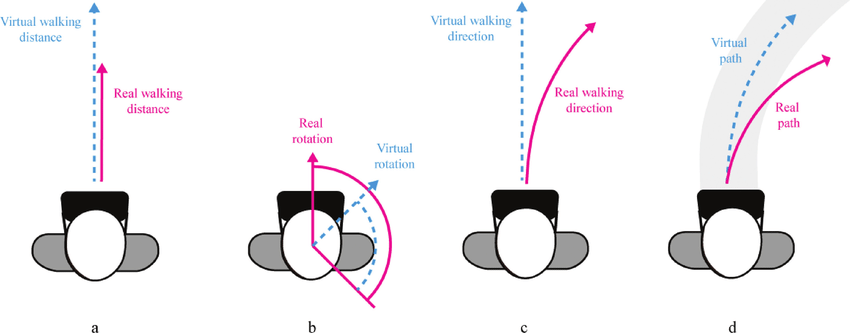
Redirection techniques often involve scaling users’ movements to keep them within the workspace. A common approach is to modify the control/display ratio by applying a “gain.” Head movements can be scaled using a rotation gain, defined as the ratio between the virtual rotation and the real-world rotation performed by the users. In most VR setups, rotation gains are applied on the yaw axis, but they could be applied on other axes.
This topic aims at investigating new ways to use gains for navigating in VR. In particular, we want to focus on drift and curvature gains that have been only used for physical locomotion techniques. The objective of this topic is to implement those gains in virtual locomotion techniques (e.g., steering, walking in place) and assess the impact of such gains on user behavior.
Tasks
- Design and implementation of virtual drift gains
- Design and implementation of virtual curvature gains
- Design and implementation of a experimental platform to assess the perception of gains
- Run an experiment to evaluate the gains
Requirements
- Knowledge of English language (source code, comments, and final report should be in English)
- Programming skills (C/C++/C#)
- Knowledge of Unity 3D and VR is advantageous
Environment
The project will be developed in Unity3D, with HTC Vive or Oculus Quest for VR immersion.
Responsible
For more information please contact Hugo Brument (https://www.vr.tuwien.ac.at/people/hugo-brument/) hugo.brument@tuwien.ac.at