[Cobodeck] Folding Structures as Haptic Props
04.10.2024

Description
There is a need to simulate large haptic surfaces with the help of a mobile robot with a robotic arm. However, it is not possible to have such big props on the robotic arm – it will not be able to move and will be unsafe for the user. Therefore, we need to develop foldable props with supporting structures that are compact enough when folded and rigid to touch when unfolded.
Task
- Develop a prototype that can fold and unfold a surface suitable for touch interaction
- Bind it with the ROS/VR system for control and synchronization
Prerequisites
Programming skills, engineering/DIY, and exploratory mindset
Possible Environments
ROS and Unity for top-level control and synchronization, C++ for controller programming
Supervisor
Khrystyna Vasylevska khrystyna.vasylevska@tuwien.ac.at
Some inspiration
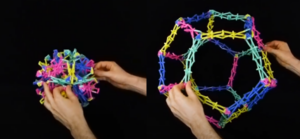

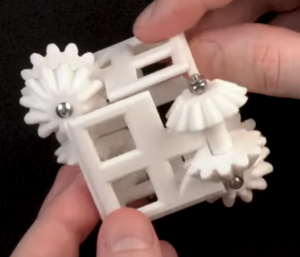
Work of Prof. Henry Segerman. More interesting ideas here: https://www.youtube.com/@henryseg/videos
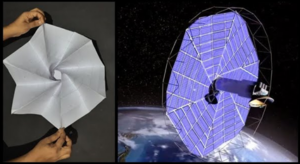
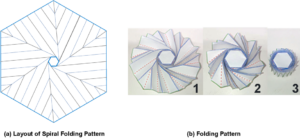
“Packaging of Thick Membranes using a Multi-Spiral Folding Approach: Flat and Curved Surfaces” V. Parque, Wataru Suzaki, Satoshi Miura, A. Torisaka, T. Miyashita, M. Natori
“Origami-Wrapped Structures with Corrugated Unfolded Forms” by Matthew Kreider and Manan Arya