topic
[Cobodeck] Optimize Mobile Robot Positioning with Reinforcement Learning
11.01.2024
Type: Bachelor thesis, Master thesis, Student Project, Seminar
Persons: 1-2
Objective:
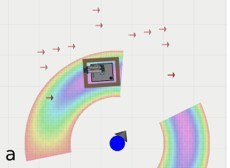
Developing a Reinforcement Learning algorithm for optimal positioning of a mobile robot, which is hovering around immersed users in a walkable VR brings new challenges including:
- Keeping a safe distance from the users to minimize collision probability
- Positioning as reachable as possible for providing haptic props to users with minimum delay
Tasks (Sub-topics):
- Research Task: Conduct an extensive exploration, analysis, and documentation of the current state-of-the-art and related works.
- Development Task: Design and implementation of a structured code including data acquisition from ROS/Unity, implementation of a sample RL framework, and evaluation of the results.
Requirements for development task:
- Basic Knowledge of programming with Python/C++
- Basic knowledge of Ubuntu and Linux command line
- Previous experience with Robot Operating System (ROS)/Unity3D is a plus
Responsible:
For more information please contact Mohammad Ghazanfari, Soroosh Mortezapoor