topic
[Cobodeck] Vision for Robot: Detect the VR User
11.09.2023
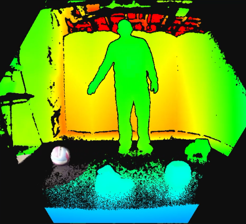
- Task: Enable fast user detection on the robot for safety and interaction
- Implement a solution for user detection:
- Whole body or only hands/legs
- Tell apart user from a static obstacle
- Test for optimal recovery (collision avoidance) behavior
- For thesis:
- Explore options for time-optimization
- Prepare and help running a user study
- Setup/IDE: Ubuntu, ROS (Robot Operating System), Azure Kinect
Prerequisites: Basic Linux command, Python 2.7 & C++
Scope: PR, Master thesis