VR Tennis Trainer
Virtual Reality Tennis Trainer
February 2020 to October 2022.
Abstract
Motion learning in VR requires a similarity metric which can indicate erroneous parts of the motion and which calculates the magnitude of error for these parts.
For this purpose, it is planned to develop a new method which will model motion similarity in a local neighborhood and which will operate in relative coordinates. Relative coordinates and local neighborhood search will be beneficial for overcoming the problems of error propagation in motion. For example, if the position of a tennis player’s legs is wrong, this error can propagate through the whole skeleton and will reflect in all body parts.
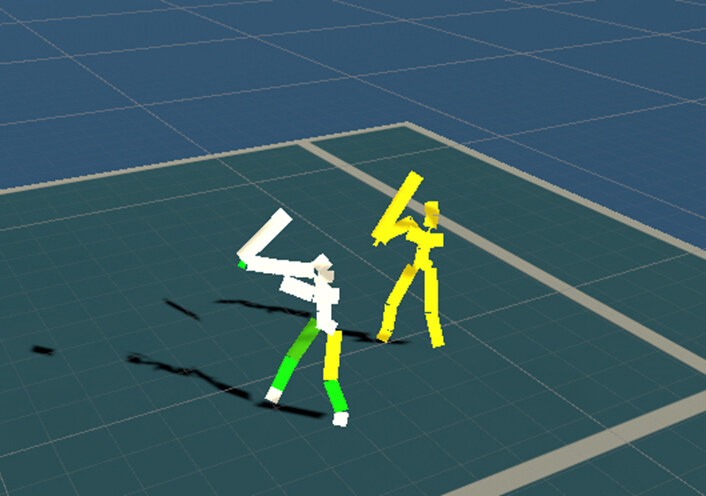
However, our motion learning application rather needs to visualize the error only on its source. Therefore, our algorithm will find similar hand motions (if they are correct) and will only indicate the error (locally) on the legs.
The motion similarity measure will take into account the relative angles of joints and their relative positions in the aligned time points. Alignment and resampling of the two compared motions will be performed to reach the state which allows a valid comparison. Additionally, local alignment will be performed (in a neighborhood around a joint) to calculate the relative error locally for each joint. To visualize the calculated error of the motion, we aim at the development of a color-coded visualization. This visualization will map the distances from the individual target motion to the animated virtual avatar.
Similarity analysis according to the tennis training methodology is an important part of the training system. Therefore, after developing the metric for motion similarity molding we will apply it to analyze important phases of the given motion. These important phases will be derived from the tennis training methodology and the result of the proposed similarity analysis will be a detailed report of the pose and motion errors in these phases.
Funding provided by
- VR Motion Learning GmbH & Co KG