Safety standards research for human-robot interaction in VR
13.07.2023
Details
Type: Bachelor thesis, Master thesis, Student Project
Persons: 1-3
Description
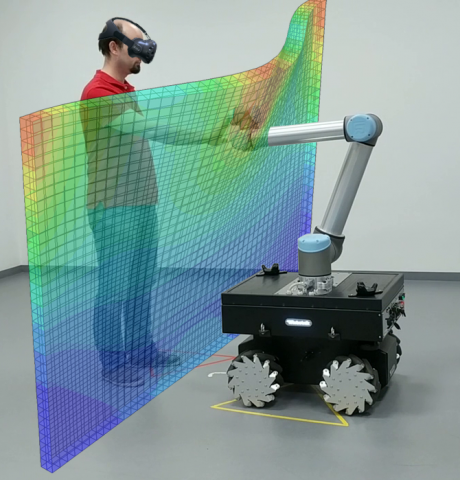
Mobile robot with a manipulator is a topic on the rise in robotics that finds applications in various domains. VR Group is employing such a robot in VR applications. We are researching safety aspects and requirements of utilizing such autonomous devices around immersed aware and unaware humans. We aim to define the safety measures for the human-robot interaction in a VR setting where the user does not necessarily see the robot.
VR requires the robots to move and interact near humans at comparable speeds, creating a danger to the user. We are looking to define the fullest set of the safety requirements and conditions for autonomous mobile robotic platforms moving around the user and together with him, concurrent human interaction with the dynamic robot arm, and a combination of both.
You are expected to build upon the most relevant and well-cited sources to suggest a viable set of rules and requirements to make the robot-human interaction safe. For instance: limit a maximum movement speed or indicate the set of proximity ranges with corresponding speed limits. Finally, you will test your solution by implementing a test scenario in Unity.
Requirements
- Knowledge of English language (source code comments and final report should be in English)
- Familiarity with Unity3D is advantageous
- Programming languages: C#, C++
Environment
Game engine: Unity3D.
Responsible