topic
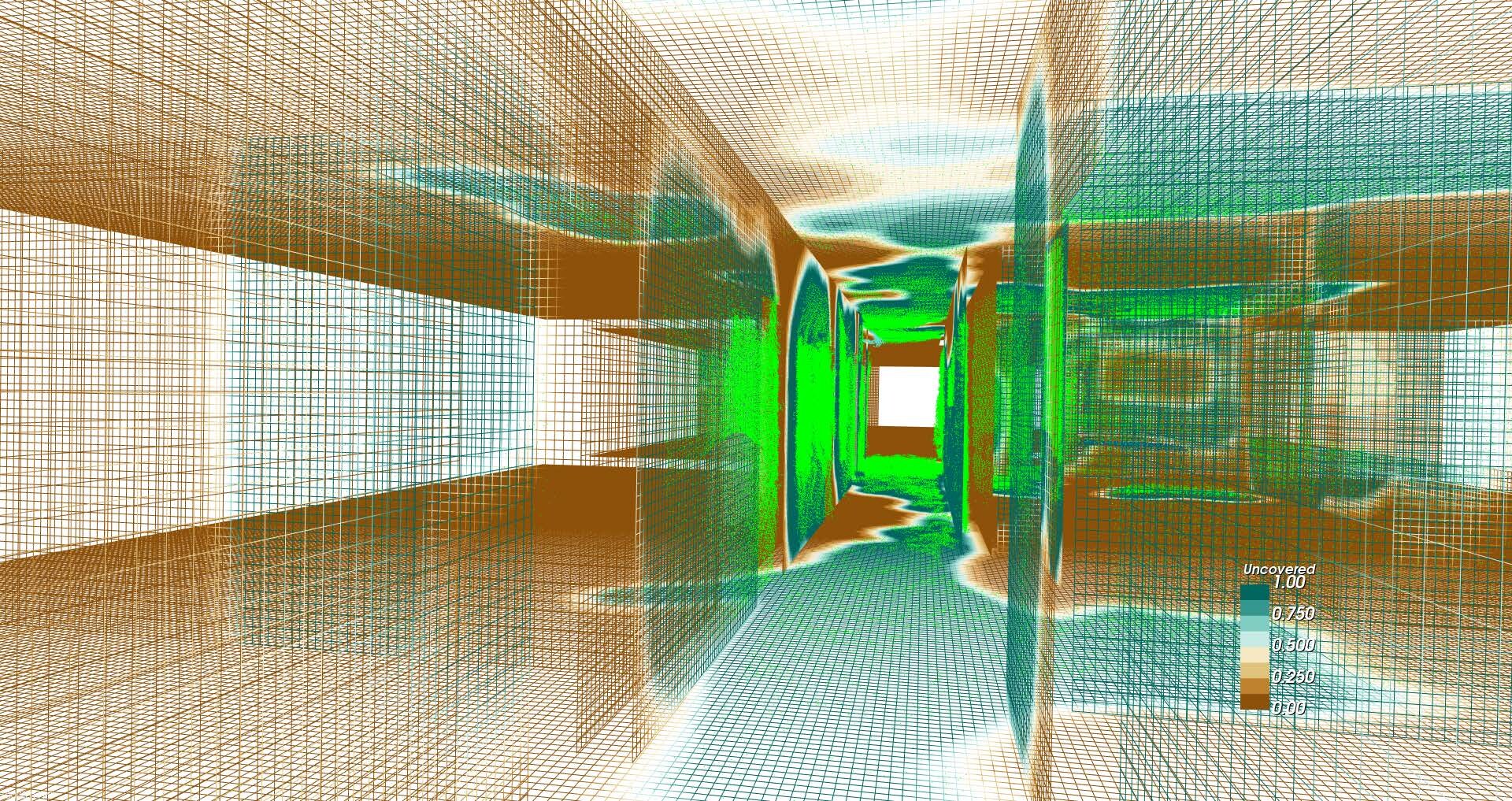
Visualization of differences between scanned point clouds and 3D models in Unity
11.09.2023
This Practicum topic is part of the research project BIMCheck.
There are multiple tasks available in this topic and it is therefore also suitable for 2-3 students:
– Implementation or improvement of algorithms to visualize the difference of scanned point clouds and 3D models.
– Improvement of the processing pipeline and interfaces, i.e. the loading and processing of point clouds scanned by Lidar and/or Kinect. Alignment, matching and comparison of these point clouds with the model to create the data for the visualization.
– Implement basic interactions with the visualized environment like showing/hiding of point-cloud, switching between wire-frame and solid, navigation (desktop) etc.

Requirements
– Knowledge of English – most of the communications and the documentation is in English
– Knowledge of Unity and C#
– Knowledge of C++ is a plus
– Interest in visualization methods is a plus
$ Financial Bonus $
In the event of a positive and timely completion of the Practicum you will get a financial bonus of several hundred euros.
Contact
Iana Podkosova yana.podkosova@tuwien.ac.at
Christian Schönauer christian.schoenauer@tuwien.ac.at